






晋城三坐标测量机的运动控制系统根据位置控制的原理,即是否有检测反馈传感器及其检测部分,分为开环控制和闭环控制。
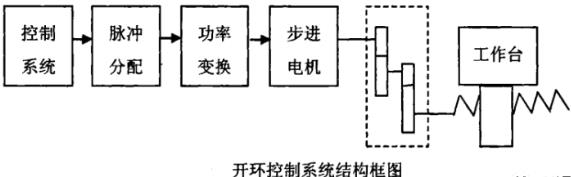
开环控制系统
如下图所示,伺服驱动器是开环的,即没有检测反馈装置。驱动电机一般采用步进电机。这种控制方式的最大特点是控制方便,结构简单,价格低廉。控制系统发出的位移指令信号流是单向的,不存在稳定性问题,但由于机械传动误差没有经过反馈修正,位移精度一般不高。
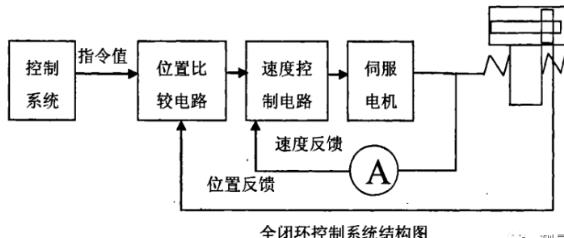
闭环控制系统
在控制系统中,如果控制装置对被控对象施加控制效果,如果可以从被控量的反馈信息中获取,即根据实际输入对控制效果进行修正,实现对被控对象的控制。受控对象。这种控制原理称为反馈控制原理。正是因为反馈信息的引入,整个控制过程才变得封闭。因此,建立在反馈原理上的控制系统称为闭环控制系统。在闭环控制系统中,其控制动作的依据是被控量与给定值的偏差。这种偏差是各种实际干扰造成的总“结果”。
因此,这类系统往往能够同时抵抗多种扰动,对系统自身元件参数的波动不是很敏感。闭环控制系统的定义:任何输出信号对控制功能有直接影响的系统。闭环控制系统具有以下突出特点: 1. 控制功能不是直接来自给定的输入,而是系统的偏差信号。偏差产生对系统受控量的控制。 2、系统被控量的反馈信息反过来影响系统的偏差信号,即控制效果的大小。
其位置反馈采用光栅等检测元件对被控对象进行检测,可消除从电机到被控单元整个机械传动链中的传动误差,获得较高的静态定位精度。
但是,在整个控制回路中,许多机械传动环节的摩擦特性、刚度和间隙是非线性的,整个机械传动链的动态响应时间(与电气响应时间相比)非常大,使得整个闭环系统稳定性校正比较困难,系统的设计和调整也比较复杂。其结构图如下图所示。